This post was originally written on September 20, 2018
Background, in 2018, I did a Houdini certification at NYP in Singapore.
Houdini Course
Last Assignment
A year ago, I completed my Houdini class. My last assignment was part of the VEX module and it’s probably the chapter that scared me the most and ended up enjoying a lot. There was a lot of “Ah ha” moments and it was really satisfying to finally be able to accomplish anything trough code and understanding it.
The final assignment brief tasked us with the following tasks:
1. Starting from the given MeteorCrash_start.hipnc file.
2. Using Houdini, fracture the meteor so that even the inside of the meteor contains small pieces.
3. Writing VEX code (through Attribute Wrangle node) to drive the meteor planet crashing effects, so that the core crashing effects are deterministic (not through any form of simulations).
4. In the VEX code, vector dot product function must be used to detect the penetration between the meteor and the planet. And vector cross product function must also be used to determine the spreading directions of the shattering pieces of the meteor.
5. Transfer attributes from the force field to the meteor to drive features of the meteor pieces (like color for example)
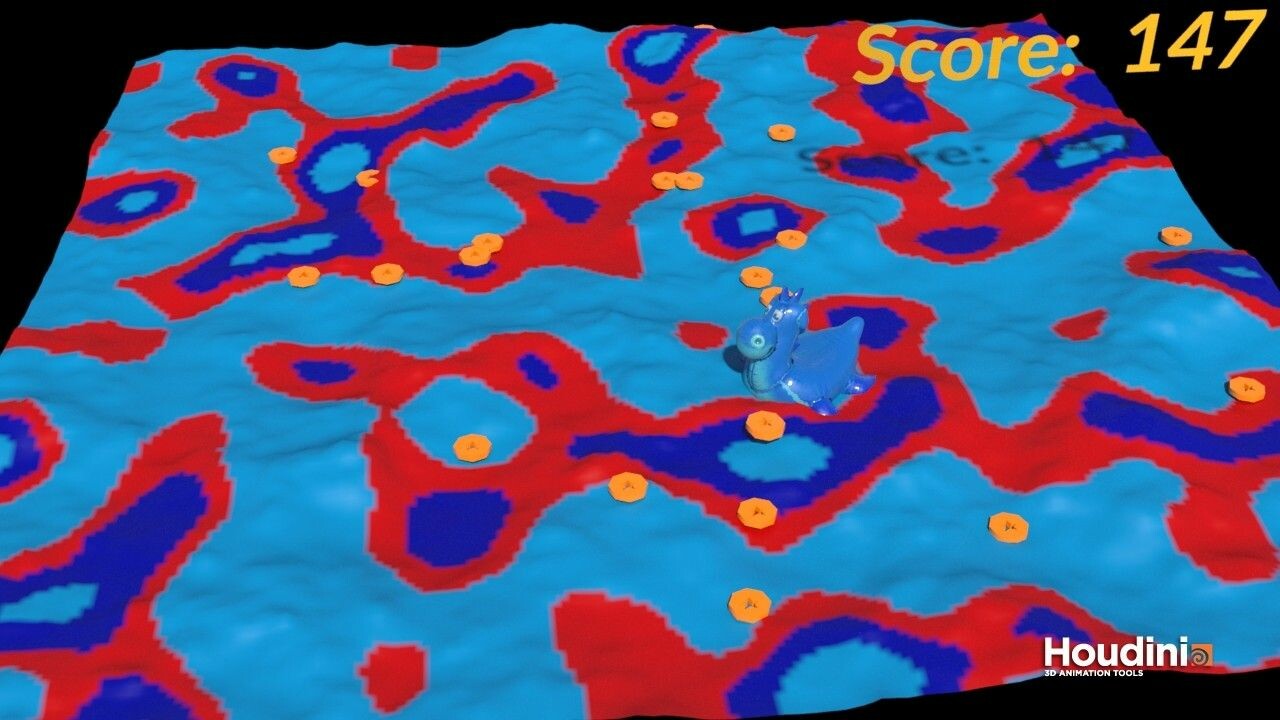
6. Flipbook at least 100 frames to show the whole process of the meteor crashing into the planet (starting from a whole meteor).
7. BONUS: adding extra particle effects to the crashing effects to make it more impactful. Simulations (through SOP Solvers or DOP Networks) can be used to create the particle effects.
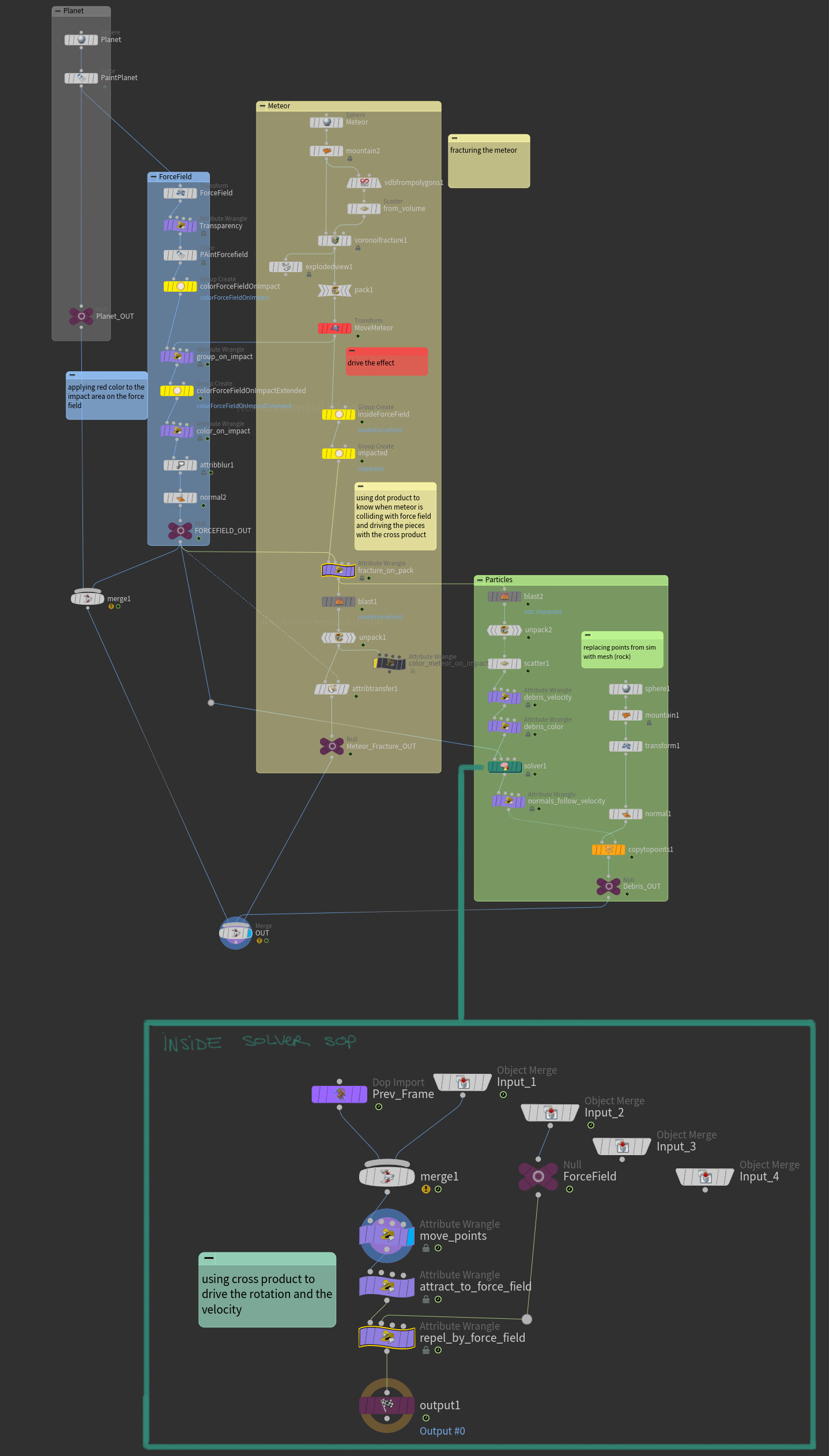
Above is the whole network I did for creating the system above. The code is stored in the attribute wrangle nodes in purple.
The meteor breakage was done using the same techniques used for the house explosion simulation.
Using vex, I was able to drive the disintegration of the meteor proportional to its distance from the planet.
//Fetch data
int nearPoint = nearpoint (1, v@P);
vector nearPos = point (1, "P", nearPoint);
vector nearNormal = point (1, "N", nearPoint);
float distance = length (nearPos - v@P);
vector diff = nearPos - v@P;
//dot product
float dot = dot (normalize(nearNormal), normalize(diff));
//set group
if (dot > 0) {
setpointgroup(0, "insideForceField", i@ptnum, 1, "set");
}
if (distance < 0.1) {
setpointgroup(0, "impacted", i@ptnum, 1, "set");
}
//cross product
vector cross = normalize(cross(nearNormal, diff));
//strenght of spreading of meteor pieces
float spread = fit(distance, 0, 0.2, 1, 0) * chf("impactForce");
vector impact = cross * spread;
//applying impact force
v@P += impacI set up groups to delete some parts once they were passed a certain distance and to transfer the color attribute of the planet atmosphere on the selected impacted pieces.
So far, all of it was deterministic. The debris are, however, a simulation because we need information from previous frame to calculate what is coming, which requires a solver sop.
The simulation was setup with an initial velocity.
Inside the solver, we used the velocity to move the particles.
v@P += v@velocity;Then, I had to create the force to drive the attraction of the particles to the planet’s force field and also the force to repel them from it.
Attract
I set the particles to be attracted to the centroid of the force field. Using a cross product, I am able to make them rotate toward that center point.
//Fetch Data
vector normalizedVelocity = normalize(v@velocity);
vector normalizedDifference = normalize(chv ("forceFieldCentroid") - v@P);
//Cross product
vector cross = normalize(cross(normalizedVelocity, normalizedDifference));
//apply rotation
vector4 myRotation = quaternion(0.5, cross);
v@velocity = qrotate(myRotation, v@velocity);Repel
The particles are rotated away from the nearest point on the force field proportionaly to the distance between them and the force field. Similarly to the attract portion, the repel portion uses a cross product to rotate the particle away. To drive the intensity of the rotation base on the distance between the particles and the nearest point on the force field, I am using a fit function like the dissolving meteor.
//fetch data
int nearPoint = nearpoint (1, v@P);
vector nearPos = point (1, "P", nearPoint);
vector nearNormal = point (1, "N", nearPoint);
vector diff = nearPos - v@P;
float distance = length(diff);
//cross product to get the axis of rotation
vector cross = normalize(cross(v@velocity, nearNormal));
//strenght of rotation we want to apply
float angle = fit(distance, 0, 0.5, 1, 0) * chf("rotationIntensity");
//apply rotation
vector4 myQuat = quaternion(angle,cross); v@velocity = qrotate(myQuat, v@velocity);In the future, I would like to improved the motion of those particles as their spreading motion is happening quite slowly and is a little bit awkward.
Post-Class
The class gave me a good foundations where I explored all the big features of Houdini and I build upon those to continually improve. It allowed me to be fluent enough so I can watch webinars, tutorials and talks with more ease. But I am also aware that I barely scratched the surface of what Houdini can do, and more broadly, the possibilities and potential of having a procedural art pipeline.
The full course is composed of two parts: the classes and a project module. I won’t be doing the project module but I still would like to do some projects and tools of my own. So I am currently brainstorming and researching what kind of tool I would like to develop. It is also a way to stay updated and keep all of what I’ve learned fresh as it’s so easy to forget things when you don’t practice.
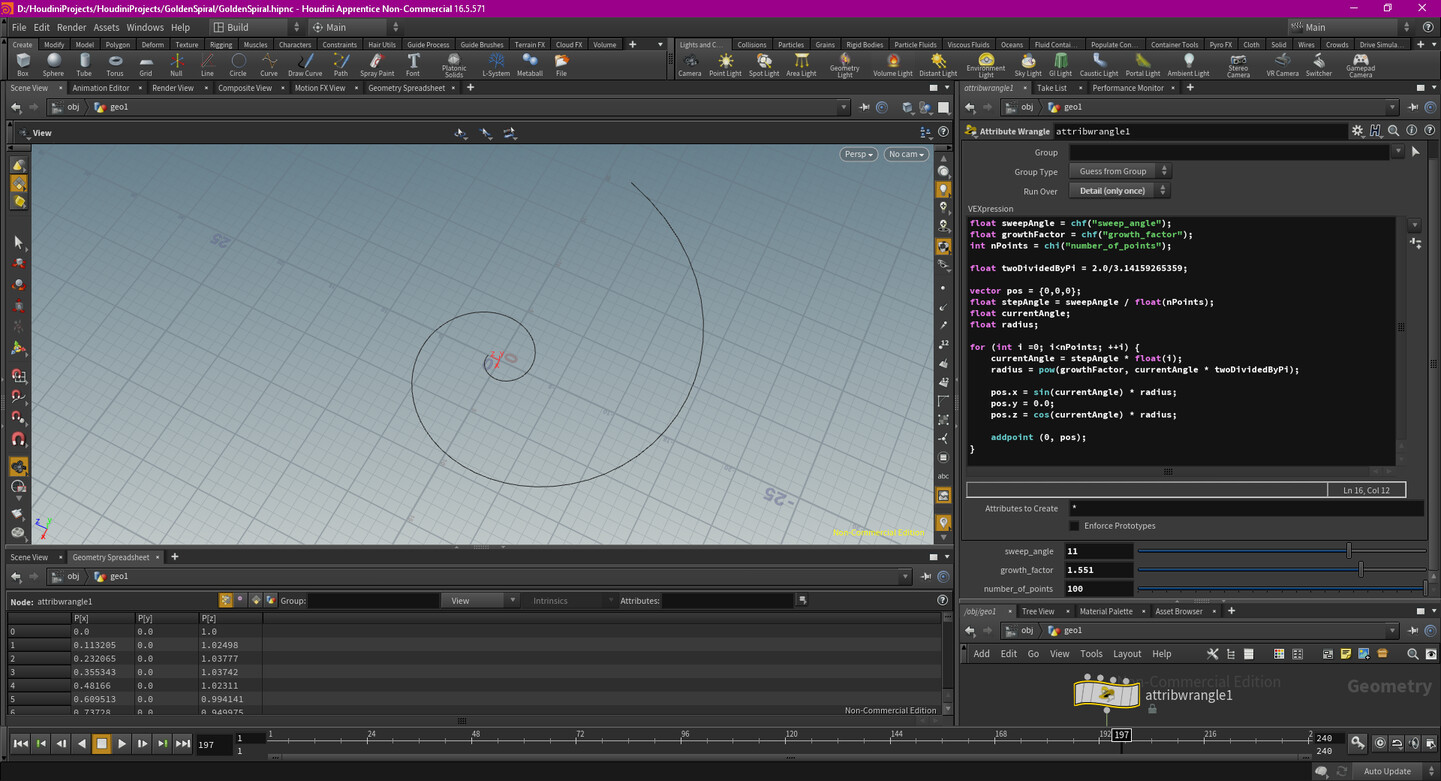
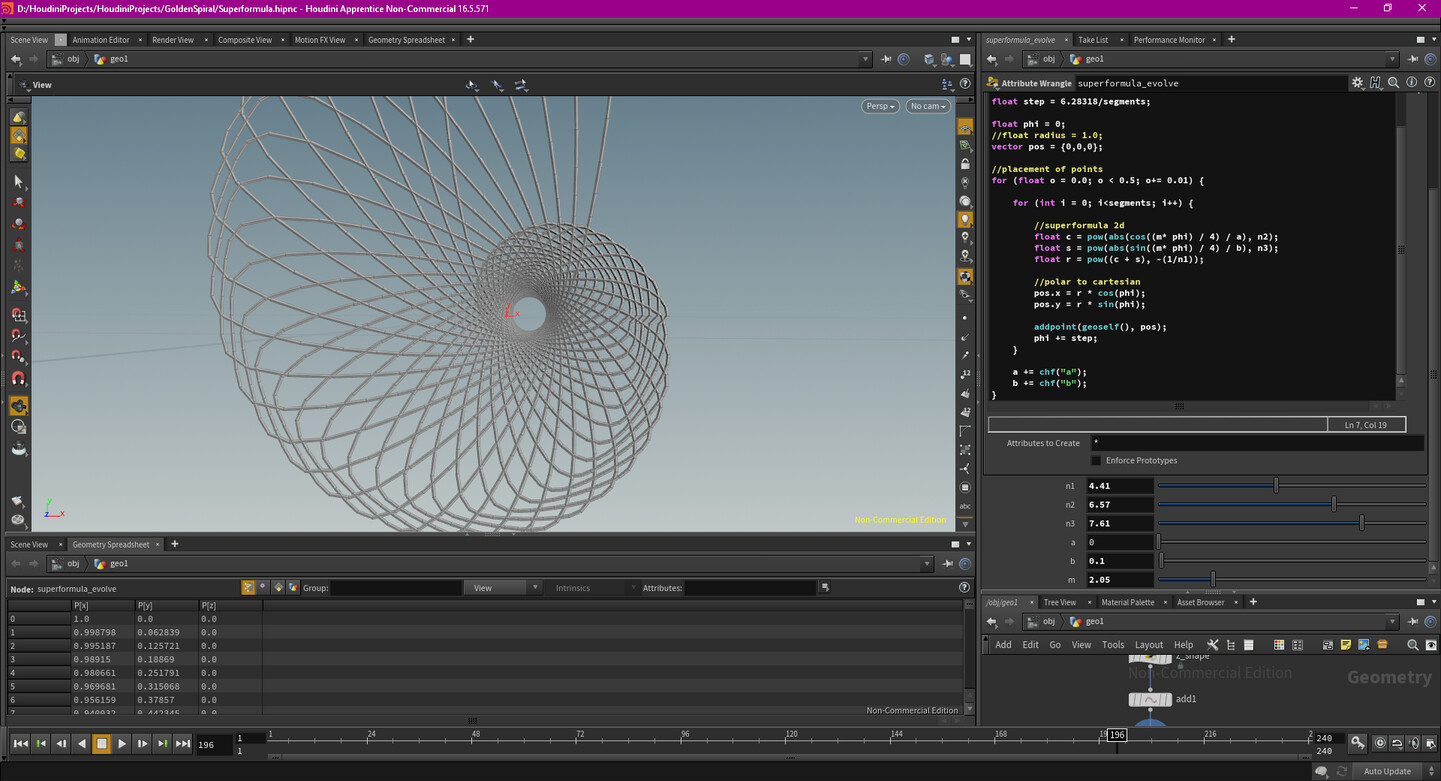
Small Tools
I created a tool for generating a golden spiral and another one to visualize the superformula. They are not converted into a digital asset yet as I am not done with the UI, but this will be the next step.